Chapter 26 Deep Learning
26.1 Recurrent Neural Networks
Multilayer perceptrons are feed-forward networks in which the information flows in only one direction, namely from the input layer to the output layer via the hidden layers. In constrast, recurrent neural networks (RNNs) are dynamically driven, with a feedback loop between two (or more) layers, which makes such networks ideal for learning from sequence data.
Let \(\cX=\lag\x_1,\x_2,\cds,\x_\tau\rag\) denote a sequence of vectors, where \(\x_t\in\R^d\) is a \(d\)-dimensional vector \((t=1,2\,\cds,\tau)\). Thus, \(\cX\) is an input sequence of length \(\tau\), with \(\x_t\) denoting the input at time step \(t\). Let \(\cY=\lag\y_1,\y_2,\cds,\y_\tau\rag\) denote a sequence of vectors, with \(\y_t\in\R^p\) a \(p\)-dimensional vector. Here \(\cY\) is the desired target or response sequence, with \(\y_t\) denoting the response vector at time \(t\). Finally, let \(\cl{O}=\lag\o_1,\o_2,\cds,\o_\tau\rag\) denote the predicted or output sequence from the RNN. Here \(\o_t\in\R^p\) is also a \(p\)-dimensional vector to match the corresponding true response \(\y_t\). The task of an RNN is to learn a function that predicts the target sequence \(\cY\) given the input sequence \(\cX\). That is, the predicted output \(\o_t\) on input \(\x_t\) should be similar or close to the target response \(\y_t\), for each time point \(t\).
To learn dependencies between elements of the input sequence, an RNN maintains a sequence of \(m\)-dimensional hidden state vectors \(\h_t\in\R^m\), where \(\h_t\) captures the essential features of the input sequences up to time \(t\). The hidden vector \(\h_t\) at time \(t\) depends on the input vector \(\x_t\) at time \(t\) and the previous hidden state vector \(\h_{t-1}\) from time \(t-1\), and it is computed as follows:
Note
\(\h_t=f^h(\W_i^T\x_t+\W_h^T\h_{t-1}+\b_h)\)
Here, \(f^h\) is the hidden state activation function, typically tanh or ReLU. Also, we need an initial hidden state vector \(\h_0\) that serves as the prior state to compute \(\h_1\). This is uaually set to the zero vector, or seeded from a prior RNN prediction step. The matrix \(\W_i\in\R^{d\times m}\) specifies the weights between the input vectors and the hidden state vectors. The matrix \(\W_h\in\R^{m\times m}\) specifies the weight matrix between the hidden state vectors at time \(t-1\) and \(t\), with \(\b_h\in\R^m\) specifying the bias terms associated with the hidden states. Note that we need only one bias vector \(\b_h\) associated with the hidden state neurons; we do not need a separate bias vector between the input and hidden neurons.
Given the hidden state vector at time \(t\), the output vector \(\o_t\) at time \(t\) is computed as follows:
Note
\(\o_y=f^o(\W_o^T\h_t+\b_o)\)
Here, \(\W_o\in\R^{m\times \p}\) specifies the weights between the hidden state and output vectors, with bias vector \(\b_o\). The output activation function \(f^o\) typically uses linear or identity activation, or a softmax activation for one-hot encoded categorical output values.
It is important to note that all the weight matrices and bias vectors are independent of the time \(t\). For example, for the hidden layer, the same weight matrix \(\W_h\) and bias vector \(\b_h\) is used and updated while training the model, over all time steps \(t\). This is an exmaple of parameter sharing or weight tying between different layers or components of a neural network. Likewise, the input weight matrix \(\W_i\), the output weight matrix \(\W_o\) and the bias vector \(\b_o\) are all shared across time. This greatly reduces the number of parameters that need to be learned by the RNN, but it also relies on the assumption that all relevant sequential features can be captured by the shared parameters.
The training data for the RNN is given as \(\D=\{\cX_i,\cY_y\}_{i=1}^n\), comprising \(n\) input sequences \(\cX_i\) and the corresponding target response sequences \(\cY_i\), with sequence length \(\tau_i\). Given each pair \((\cX,\cY)\in\D\), with \(\cX=\lag\x_1,\x_2,\cds,\x_\tau\rag\) and \(\cY=\lag\y_1,\y_2,\cds,\y_\tau\rag\), the RNN has to update the model parameters \(\W_i,\W_h,\b_h,\W_o,\b_o\) for the input, hidden and output layers, to learn the corresponding output sequence \(\cl{O}=\lag\o_1,\o_2,\cds,\o_\tau\rag\). For training the network, we compute the error or loss between the predicted and response vectors over all time steps. The squared error loss is given as
If we use a softmax activation at the output layer, then we use the cross-entropy loss, given as
where \(\y_t=(y_{t1},y_{t2},\cds,y_{tp})^T\in\R^p\) and \(\o_t=(o_{t1},o_{t2},\cds,o_{tp})^T\in\R^p\). On training input of length \(\tau\) we first unfold the RNN for \(\tau\) steps, following which the parameters can be learned via the standard feed-forward and backpropagation steps, keeping in mind the connections between the layers.
26.1.1 Feed-forward in Time
The feed-forward process starts at time \(t=0\), taking as input the initial hidden state vector \(\h_0\), which us usually set to \(\0\) or it can be user-specified, say from a previous prediction step.
We can observe that the RNN implicitly makes a prediction for every prefix of the input sequence, since \(\o_t\) depends on all the previous input vectors \(\x_1,\x_2,\cds,\x_t\) but not on any future inputs \(\x_{t+1},\cds,\x_\tau\).
26.1.2 backpropagation in Time
For the backpropagation step it is easier to view the RNN in terms of the distinct layers based on the dependencies, as opposed to unfolding in time.
Let \(\cE_{\x_t}\) denote the loss on input vector \(\x_t\) from the input sequence \(\cX=\lag\x_1,\x_2,\cds,\x_\tau\rag\). The unfolded feed-forward RNN for \(\cX\) has \(l=\tau+1\) layers. Define \(\bs\delta_t^o\) as the net gradient vector for the output vector \(\o_t\), i.e., the derivative of the error function \(\cE_{\x_t}\) with respect to the net value at each neuron in \(\o_t\), given as
where \(\o_t=(o_{t1},o_{t2},\cds,o_{tp})^T\in\R^p\) is the \(p\)-dimensional output vector at time \(t\), and \(net_{ti}^o\) is the net value at output neuron \(o_{ti}\) at time \(t\). Likewise, let \(\bs\delta_t^h\) denote the net gradient vector for the hidden state neurons \(\h_t\) at time \(t\)
where \(\h_t=(h_{t1},h_{t2},\cds,h_{tm})^T\in\R^m\) is the \(m\)-dimensional hidden state vector at time \(t\), and \(net_{ti}^h\) is the net value at hidden neuron \(h_{ti}\) at time \(t\). Let \(f^h\) and \(f^o\) denote the activation functions for the hidden state and output neurons, and let \(\pd\f_t^h\) and \(\pd\f_t^o\) denote the vector of the derivatives of the activation function with respect to the net signal for the hidden and output neurons at time \(t\), given as
Finally, let \(\pd\bs\cE_{\x_t}\) denote the vector of partial derivatives of the error function with respect to \(\o_t\):
Computing Net Gradients
The net gradient vector at the output \(\o_t\) can be computed as follows:
Note
\(\bs\delta_t^o=\pd\f_t^o\od\pd\bs\cE_{\x_t}\)
For example, if \(\cE_{\x_t}\) is the squared error function, and the output layer uses the identity funciton, then we have
On the other hand, the net gradients at each of the hidden layers need to account for the incoming net gradients from \(\o_t\) and from \(\h_{t+1}\). The net gradient vector for \(\h_t(\rm{for\ }t=1,2,\cds,\tau-1)\) is given as
Note
\(\bs\delta_t^h=\pd\f_t^h\od((\W_o\cd\bs\delta_t^o)+(\W_h\cd\bs\delta_{t+1}^h))\)
Note that for \(\h_\tau\), it depends only on \(\o_\tau\), therefore
For the tanh activation, which is commonly used in RNNs, the derivative of the activation function with respect to the net values at \(\h_t\) is given as
Finally, note that the net gradients do not have to be computed for \(\h_0\) or for any of the input neurons \(\x_t\), since these are leaf nodes in the backpropagation graph, and thus do not backpropagate the gradients beyond those neurons.
Stochastic Gradient Descent
The net gradients for the output \(\bs\delta_t^o\) and hidden \(\bs\delta_t^h\) at time \(t\) can be used to compute the gradients for the weight matrices and bias vectors at each time point. However, since an RNN uses parameter sharing across time, the gradients are obtained by summing up all of the contributions from each time step \(t\). Define \(\nabla_{\w_o}^t\) and \(\nabla_{\b_o}^t\) as the gradients of the weights and biases between the hidden neurons \(\h_t\) and output neurons \(\o_t\) for time \(t\). Using the backpropagation equations, for deep multilayer perceptrons, these gradients are computed as follows:
Likewise, the gradients of the other shared parameters between hidden layers \(\h_{t-1}\) and \(\h_t\), and between the input layer \(\x_t\) and hidden layer \(\h_t\), are obtained as follows:
Note
\(\W_i=\W_i-\eta\cd\nabla_{\w_i}\quad\W_h=\W_h-\eta\cd\nabla_{\w_h}\quad\b_h=\b_h-\eta\cd\nabla_{\b_h}\)
\(\W_o=\W_o-\eta\cd\nabla_{\w_o}\quad\b_o=\b_o-\eta\cd\nabla_{\b_o}\)
26.1.3 Training RNNs
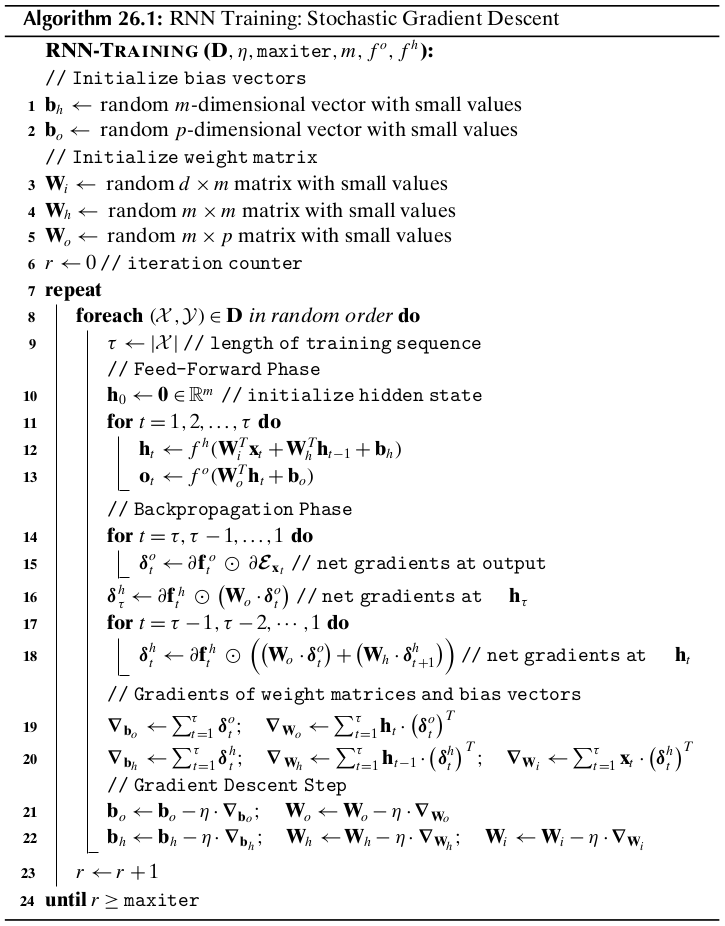
Note that Line 15 shows the case where the output layer neurons are independent; if they are not independent we can replace it by \(\pd\bs{\rm{F}}^o\cd\pd\bs\cE_{\x_t}\).
In practice, RNNs are trained using subsets or minibatches of input sequences instead of single sequences. This helps to speed up the computation and convergence of gradient descent, since minibatches provide better estimates of the bias and weight gradients and allow the use of vectorized operations.
26.1.4 Bidirectional RNNs
A bidirectional RNN (BRNN) extends the RNN model to also include information from the future. In particular, a BRNN maintains a backward hidden state vector \(\b_t\in\R^m\) that depends on the next backward hidden state \(\b_{t+1}\) and the current input \(\x_t\). The output at time \(t\) is a function of both \(\h_t\) and \(\b_t\).
Note
\(\h_t=f^h(\W_{ih}^T\x_t+\W_h^T\h_{t-1}+\b_h)\)
\(\b_t=f^b(\W_{ib}^T\x_t+\W_b^T\b_{t+1}+\b_b)\)
Also, a BRNN needs two initial state vectors \(\h_0\) and \(\b_{\tau+1}\) to compute \(\b_1\) and \(\b_\tau\), respectively. These are usually set to \(\0\in\R^m\). The forward and backward hidden states are computed independently, with the forward hidden states omputed by considering the input sequence in the forward direction, and with the backward hidden states computed by considering the sequence in reverse order. The output at time \(t\) is computed only when both \(\h_t\) and \(\b_t\) are available, and is given as
26.2 Gated RNNs: Long Short-Term Memory Networks
One of the problems in training RNNs is their susceptibility to either the vanishing gradient or exploding gradient problem. For example, consider the task of computing the net gradient vector \(\bs\delta_t^h\) for the hidden layer at time \(t\), given as
Assume for simplicity that we use a linear activation function, i.e., \(\pd\f_t^h=\1\), and let us ignore the net gradient vector for the output layer, focusing only on the dependence on the hidden layers. Then for an input sequence of length \(\tau\), we have
We can observe that the net gradient from time \(\tau\) affects the net gradient vector at time \(t\) as a function of \(\W_h^{\tau-t}\), i.e., as powers of the hidden weight matrix \(\W_h\). Let the spectral radius of \(\W_h\), defined as the absolute value of its largest eigenvalue, be given as \(|\ld_1|\). It turns out that if \(|\ld_1|<1\), then \(\lv\W_h^k\rv\ra 0\) as \(k\ra\infty\), that is, the gradients vanish as we train on long sequences. On the other hand, if \(|\ld_1|>1\), the nat least one element of \(\W_h^k\) becomes unbounded and thus \(\lv\W_h^k\rv\ra\infty\) as \(k\ra\infty\), that is, the gradients explode as we train on long sequences. Therefore, for the error to neither vanish nor explode, the spectral radius of \(\W_h\) should remian 1 or very close to it.
Long short-term memory (LSTM) networks alleviate the vanishing gradients problem by using gate neurons to control access to the hidden states. Consider the \(m\)-dimensional hidden state vector \(\h_t\in\R^m\) at time \(t\). In a regular RNN, we update the hidden state as follows:
Let \(\g\in\{0,1\}^m\) be a binary vector. If we take the element-wise product of \(\g\) and \(\h_t\), namely, \(\g\od\h_t\), then elements of \(\g\) act as gates that either allow the corresponding element of \(\h_t\) to be retained or set to zero. The vector \(\g\) thus acts as logical gate that allows selected elements of \(\h_t\) to be remembered or fogotten. However, for backpropagation we need differentiable gates, for which we use sigmoid activation on the gate neurons so that their value lies in the range \([0,1]\). Like a logical gate, such neurons allow the inputs to be completely remembered if the value is 1, or forgotten if the value is 0. In addition, they allow a weighted memory, allowing partial remembrance of the elements of \(\h_t\), for values between 0 and 1.
26.2.1 Forget Gate
We consider an RNN with a forget gate. Let \(\h_t\in\R^m\) be the hidden state vector, and let \(\bs\phi_t\in\R^m\) be a forget gate vector. Both these vectors have the same number of neurons, \(m\).
In a regular RNN, assuming tanh activation, the hidden state vector is updated unconditionally, as follows:
Instead of directly updating \(\h_t\), we will employ the forget gate neurons to control how much of the prvious hidden state vector to forget when computing its new value, and also to control how to update it in light of the new input \(\x_t\).
Given input \(\x_t\) and previous hidden state \(\h_{t-1}\), we first compute a candidate update vector \(\u_t\), as follows:
Note
\(\u_t=\tanh(\W_u^T\x_t+\W_{hu}^T\h_{t-1}+\b_u)\)
The candidate update vector \(\u_t\) is essentially the unmodified hidden state vector, as in a regular RNN.
Using the forget gate, we can compute the new hidden state vector as follows:
Note
\(\h_t=\bs\phi_t\od\h_{t-1}+(1-\bs\phi_t)\od\u_t\)
We can see that the new hidden state vector retains a fraction of the previous hidden state values, and a (complementary) fraction of the candidate update values. Observe that if \(\bs\phi_t=\0\), i.e., if we want to entirely forget the previous hidden state, then \(\1-\bs\phi_t=\1\), which means that the hidden state will be updated completely at each time step just like in a regular RNN. Finally, given the hidden state \(\h_t\), we can compute the output vector \(\o_t\) as follows
Note
\(\bs\phi_t=\sg(\W_\phi^T\x_t+\W_{h\phi}^T\h_{t-1}+\b_\phi)\)
where we use a sigmoid activation function, denoted \(\sg\), to ensure that all the neuron values are in the range \([0,1]\), denoting the extent to which the corresponding previous hidden state values should be forgotten.
A forget gate vector \(\bs\phi_t\) is a layer that depends on the previous hidden state layer \(\h_{t-1}\) and the current input layer \(\x_t\); these connections are fully connected, and are specified by the corresponding weight matrices \(\W_{h\phi}\) and \(\W_{\phi}\), and the bias vector \(\b_\phi\). On the other hand, the output of the forget gate layer \(\bs\phi_t\) needs to modify the previous hidden state layer \(\h_{t-1}\), and therefore, both \(\bs\phi_t\) and \(\h_{t-1}\) feed into what is essentially a new element-wise product layer. Finally, the output of this element-wise product layer is used as input to the new hidden layer \(\h_t\) that also takes input from another element-wise gate that computes the output from the candidate update vector \(\u_t\) and the complemented forget gate, \(\1-\bs\phi_t\). Thus, unlike regular layers that are fully connected and have a weight matrix and bias vector between the layers, the connections between \(\bs\phi_t\) and \(\h_t\) via the element-wise layer are all one-to-one, and the weights are fixed at the value 1 with bias 0. Likewise the connections between \(\u_t\) and \(\h_t\) via the other element-wise layer are also one-to-one, with weights fixed at 1 and bias at 0.
Computing Net Gradients
An RNN with a forget gate has the following parameters it needs to learn, namely the weight matrices \(\W_u,\W_{hu},\W_\phi,\W_{h\phi},\W_o\), and the bias vectors \(\b_u,\b_\phi,\b_o\).
Let \(\bs\delta_t^o, \bs\delta_t^h, \bs\delta_t^\phi, \bs\delta_t^u\) denote the net gradient vectors at the output, hidden, forget gate, and candidate update layers, respectively. During backpropagation, we need to compute the net gradients at each layer. The net gradients at the outputs are computed by considering the partial derivatives of the activation function \(\pd\f_t^o\) and the error function \(\pd\bs\cE_{\x_t}\):
For the other layers, we can reverse all the arrows to determine the dependencies between the layers. Therefore, to compute the net gradient for the update layer \(\bs\delta_t^u\), notice that in backpropagation it has only one incoming edge from \(\h_t\) via the element-wise product \((\1-\bs\phi_t)\od\u_t\). The net gradient \(\delta_{ti}^u\) at update layer neuron \(i\) at time \(t\) is given as
where \(\frac{\pd net_{ti}^h}{\pd u_{ti}}=\frac{\pd}{\pd u_{ti}}\) \(\{\phi_{ti}\cd h_{t-1,i}+(1-\phi_{ti})\cd u_{ti}\}=1-\phi_{ti}\), and we use the fact that the update layer uses a tanh activation function. Across all neurons, we obtain the net gradient at \(\u_t\) as follows:
To compute the net gradient vector for the forget gate, we observe that there are two incoming flows into \(\bs\phi_t\) during backpropagation-one from \(\h_t\) via the element-wise product \(\bs\phi_t\od\h_{t-1}\), and the other also from \(\bs\h_t\) via the element-wise product \((\1-\bs\phi_t)\od\u_t\). Therefore, the net gradient \(\delta_{ti}^\phi\) at forget gate neuron \(i\) at time \(t\) is given as
where \(\frac{\pd net_{ti}^h}{\pd\phi_{ti}}=\frac{\pd}{\pd\phi_{ti}}\) \(\{\phi_{ti}\cd h_{t-1,i}+(1-\phi_{ti})\cd u_{ti}\}=h_{t-1,i}-u_{ti}\), and we use the fact that the forget gate uses a sigmoid activation function. Across all neurons, we obtain the net gradient at \(\bs\phi_t\) as follows:
We can observe that if we reverse the arrows, \(\bs\delta_t^h\) depends on the gradients at the output layer \(\o_t\), the forget gate layer \(\bs\phi_{t+1}\), the update layer \(\u_{t+1}\), and on the hidden layer \(\h_{t+1}\) via the element-wise product \(\h_{t+1}\od\bs\phi_{t+1}\). The output, forget and update layers are treated as in a regular RNN. However, due to the element-wise layer, the flow from \(\h_{t+1}\) is handled as follows:
where \(\frac{\pd net_{t+1,i}^h}{\pd h_{ti}}=\frac{\pd}{\pd h_{ti}}\) \(\{\phi_{t+1,i}\cd h_{ti}+(1-\phi_{t+1,i})\cd u_{t+1,i}\}=\phi_{t+1,i}\), and we used the fact that \(\h_t\) implicitly uses an identity activation function. Across all the hidden neurons at time \(t\), the net gradient vector component from \(\h_{t+1}\) is given as \(\bs\delta_{t+1}^h\od\bs\phi_{t+1}\). Considering all the layers, including the output, forget, update and element-wise layers, the complete net gradient vector at the hidden layer at time \(t\) is given as:
26.2.2 Long Short-Term Memory (LSTM) Networks
LSTMs use differentiable gate vectors to control the hidden state vector \(\h_t\), as well as another vector \(\c_t\in\R^m\) called the internal memory vector. In particular, LSTMs utilize three gate vectors: an input gate vector \(\bs\kappa_t\in\R^m\), a forget gate vector \(\bs\phi_t\in\R^m\), and an output get vector \(\bs\omega_t\in\R^m\). Like a regular RNN, an LSTM also maintains a hidden state vecftor for each time step. However, the content of the hidden vector is selectively copied from the internal memory vector via the output gate, with the internal memory being updated via the input gate and parts of it forgotten via the forget gate.
Let \(\cX=\lag\x_1,\x_2,\cds,\x_\tau\rag\) denote a sequence of \(d\)-dimensional input vectors of length \(\tau\), \(\cY=\lag\y_1,\y_2,\cds,\y_\tau\rag\) the sequence of \(p\)-dimensional response vectors, and \(\cl{O}=\lag\o_1,\o_2,\cds,\o_\tau\rag\) the \(p\)-dimensional output sequence from an LSTM. At each time step \(t\), the three gate vectors are updated as follows:
Note
\(\bs\kappa_t=\sigma(\W_\kappa^T\x_t+\W_{h\kappa}^T\h_{t-1}+\b_\kappa)\)
\(\bs\phi_t=\sigma(\W_\phi^T\x_t+\W_{h\phi}^T\h_{t-1}+\b_\phi)\)
\(\bs\omega_t=\sigma(\W_\omega^T\x_t+\W_{h\omega}^T\h_{t-1}+\b_\omega)\)
Here \(\sigma(\cd)\) denotes the sigmoid activation function. The input gate vector \(\bs\kappa_t\) controls how much of the input vector, via the candidate update vector \(\u_t\), is allowed to influence the memory vector \(\c_t\). The forget gate vector \(\bs\phi_t\) controls how much of the previous memory vector to feget, and finally the output gate vector \(\bs\omega_t\) controls how much of the memory state is retained for the hidden state.
Given the current input \(\x_t\) and the previous hidden state \(\h_{t-1}\), an LSTM first computes a candidate update vector \(\u_t\) after applying the tanh activation:
Note
\(\u_t=\tanh(\W_u^T\x_t+\W_{hu}^T\h_{t-1}+\b_u)\)
It then applies the different gates to compute the internal memory and hidden state vectors:
Note
\(\c_t=\bs\kappa_t\od\u_t+\bs\phi_t\od\c_{t-1}\)
\(\h_t=\bs\omega_t\od\tanh(\c_t)\)
Finally, the output of the network \(\o_t\) is obtained by applying the output activaton function \(f^o\) to an affine combination of the hidden state neuron values:
LSTMs can typically handle long sequences since the net gradients for the internal memory states do not vanish over long time steps. This is because, by design, the memory state \(\c_{t-1}\) at time \(t-1\) is linked to the memory state \(\c_t\) at time \(t\) via implicit weights fixed at 1 and biases fixed at 0, with linear activation. This allows the error to flow across time steps without vanishing or exploding.
26.2.3 Training LSTMs
During backpropagation the net gradient vector at the output layer at time \(t\) is computed by considering the partial derivatives of the activation funciton, \(\pd\f_t^o\) and the error function, \(\pd\bs\cE_{\x_t}\) as follows:
where we assume that the output neurons are independent.
In backpropagation there are two incoming connections to the internal memory vector \(\c_t\), one from \(\h_t\) and the other from \(\c_{t+1}\). Therefore, the net gradient \(\delta_{ti}^c\) at the internal memory neuron \(i\) at time \(t\) is given as
where we use the fact that the internal memory vector implicitly uses an identity activation function, and furthermore
The net gradient vector \(\bs\delta_t^c\) at \(\bs\c_t\) is therefore given as:
The forget gate has only one incoming edge in backpropagation, from \(\c_t\), via the element-wise multiplication \(\bs\phi_t\od\c_{t-1}\), with sigmoid activation, therefore the net gradient is:
where we used the fact that the forget gate uses sigmoid activation and
Across all forget gate neurons, the net gradient vector is therefore given as
The input gate also has only one incoming edge in backpropagation, from \(\c_t\), via the element-wise multiplication \(\bs\kappa_t\od\u_t\), with sigmoid activation. In a similar manner, as outlined above for \(\bs\delta_t^\phi\), the net gradient \(\bs\delta_t^\kappa\) at the input gate \(\bs\kappa_t\) is given as:
The same reasoning applies to the update candidate \(\u_t\), which also has an incoming edge from \(\c_t\) via \(\bs\kappa_t\od\u_t\) and tanh activation, so the net gradient vector \(\bs\delta_t^u\) at the update layer is
Likewise, in backpropagation, there is one incoming connection to the output gate from \(\h_t\) via \(\bs\omega_t\od\tanh(\c)\) with sigmoid activation, therefore
Finally, to compute the net gradients at the hidden layer, note that gradients flow back to \(\h_t\) from the following layers: \(\bs\u_{t+1},\bs\kappa_{t+1},\bs\phi_{t+1},\bs\omega_{t+1},\o_t\). Therefore, the net gradient vector at the hidden state vector \(\bs\delta_t^h\) is given as
The gradients for the weight matrix and bias vector at the output layer are given as:
Likewise, the gradients for the weight matrices and bias vectors for the other layers are given as follows:
Given these gradients, we can use the stochastic gradient descent approach to train the network.
26.3 Convolutional Neural Networks
A convolutional neural network (CNN) is essentially a localized and sparse feedforward MLP that is designed to exploit spatial and/or temporal structure in the input data. In a regular MLP all of the neurons in layer \(l\) are connected to all of the neurons in layer \(l+1\). In contrast, a CNN connects a contiguous or adjacent subset of neurons in layer \(l\) to a single neuron in the next layer \(l+1\). Different sliding windows comprising contiguous subsets of neurons in layer \(l\) connect to different neurons in layer \(l+1\). Furthermore, all of these sliding windows use parameter sharing, that is, the same set of weights, called a filter, is used for all sliding windows. Finally, different filters are used to automatically extract features from layer \(l\) for use by layer \(l+1\).
26.3.1 Convolutions
1D Convolution
Let \(\x=(x_1,x_2,\cds,x_n)^T\) be an input vector (a one-way or 1D input) with \(n\) points. It is assumed that the input points \(x_i\) are not independent, but rather, there are dependencies between successive points. Let \(\w=(w_1,w_2,\cds,w_k)^T\) be a vector of weights, called a 1D filter, with \(k\leq n\). Here \(k\) is also called the window size. Let \(\x_k(i)\) denote the window of \(\x\) of length \(k\) starting at position \(i\), given as
with \(1\leq i\leq n-k+1\). Given a vector \(\a\in\R^k\), define the summation operator as one that adds all the elements of the vector. That is,
A 1D convolution between \(\x\) and \(\w\), denoted by the asterisk symbol \(*\), is defined as
Note
\(\dp\sum(\x_k(i)\od\w)=\sum_{j=1}^kx_{i+j-1}\cd w_j\)
for \(i=1,2,\cds,n-k+1\). We can see that the convolution of \(\x\in\R^n\) and \(\w\in\R^k\) results in a vector of length \(n-k+1\).
2D Convolution
Let \(\X\) be an \(n\times n\) input matrix, and let \(\W\) be a \(k\times k\) matrix of weights, called a 2D filter, with \(k\leq n\). Here \(k\) is called the window size. Let \(\X_k(i,j)\) denote the \(k\times k\) submatrix of \(\X\) starting at row \(i\) and column \(j\), defined as follows:
with \(1\leq i,j\leq n-k+1\). Given a \(k\times k\) matrix \(\A\in\R^{k\times k}\), define the summation operator as one that adds all the elements of the matrix.
where \(a_{i,j}\) is the element of \(\A\) at row \(i\) and column \(j\). The 2D convolution of \(\X\) and \(\W\), denoted \(\X*\W\), is defined as
Note
\(\dp\rm{\sum}(\X_k(i,j)\od\W)=\sum_{a=1}^k\sum_{b=1}^kx_{i+a-1,j+b-1}\cd w_{a,b}\)
for \(i,j=1,2,\cds,n-k+1\). The convolution of \(\X\in\R^{n\times n}\) and \(\W\in\R^{k\times k}\) results in a \((n-k+1)\times(n-k+1)\) matrix.
3D Convolution
The three-dimensional matrix is also called a 3D tensor. The first dimension comprises the rows, the second the columns, and the third the channels. Let \(\X\) be an \(n\times n\times m\) tensor, with \(n\) rows, \(n\) columns and \(m\) channels. The assumption is that the input \(\X\) is a collection of \(n\times n\) matrices obtained by applying \(m\) filters, which specify the \(m\) channels.
Let \(\W\) be a \(k\times k\times r\) tensor of weights, called a 3D filter, with \(k\leq n\) and \(r\leq m\). Let \(\X_k(i,j,q)\) denote the \(k\times k\times r\) subtensor of \(\X\) starting at row \(i\), column \(j\) and channel \(q\), with \(1\leq i,j\leq n-k+1\) and \(1\leq q\leq m-r+1\).
Given a \(k\times k\times r\) tensor \(\A\in\R^{k\times k\times r}\), define the summation operator as one that adds all the elements of the tensor.
where \(a_{i,j,q}\) is the element of \(\A\) at row \(i\), column \(j\) and channel \(q\). The 3D convolution of \(\X\) and \(\W\), denoted \(\X*\W\), is defined as:
Note
\(\dp\rm{\sum}(\X_k(i,j,q)\od\W)=\sum_{a=1}^k\sum_{b=1}^k\sum_{c=1}^rx_{i+a-1,j+b-1,q+c-1}\cd w_{a,b,c}\)
for \(i,j=1,2,\cds,n-k+1\) and \(q=1,2,\cds,m-r+1\). We can see that the convolution of \(\X\in\R^{n\times n\times m}\) and \(\W\in\R^{k\times k\times r}\) results in a \((n-k+1)\times(n-k+1)\times(m-r+1)\) tensor.
3D Convolutions in CNNs
Typically in CNNs, we use a 3D filter \(\W\) of size \(k\times k\times m\), with the number of channels \(r=m\), the same as the number of channels in \(\X\in\R^{n\times n\times m}\). Let \(\X_k(i,j)\) be the \(k\times k\times m\) subtensor of \(\X\) starting at row \(i\) and column \(j\). Then the 3D convolution of \(\X\) and \(\W\) is given as:
We can see that when \(\W\in\R^{k\times k\times m\), its 3D convolution with \(\X\in\R^{n\times n\times m}\) results in a \((n-k+1)\times(n-k+1)\) matrix, since there is no freedom to move in the third dimension. Henceforth, we will always assume that a 3D filter \(\W\in\R^{k\times k\times m}\) has the same number of channels as the tensor \(\X\) on which it is applied. Since the number of channels is fixed based on \(\X\), the only parameter needed to fully specify \(\W\) is the window size \(k\).
26.3.2 Bias and Activation Functions
Let \(\Z^l\) be an \(n_l\times n_l\times m_l\) tensor of neurons at layer \(l\) so that \(z_{i,j,q}^l\) denotes the value of the neuron at row \(i\), column \(j\) and channel \(q\) for layer \(l\), with \(1\leq i,j\leq n_l\) and \(1\leq q\leq m_l\).
Filter Bias
Let \(\W\) be a \(k\times k\times m_l\) 3D filter. Let \(b\in\R\) be a scalar bias value for \(\W\), and let \(\Z_k^l(i,j)\) denote the \(k\times k\times m_l\) subtensor of \(\Z^l\) at position \((i,j)\). Then, the net signal at neuron \(z_{i,j}^{l+1}\) in layer \(l+1\) is given as
and the value of the neuron \(\z_{i,j}^{l+1}\) is obtained by applying some activation function \(f\) to the net signal
The activation function can be any of the ones typically used in neural networks. In the language of convolutions, the values of the neurons in layer \(l+1\) is given as follows:
Multiple 3D Filters
We can observe that one 3D filter \(\W\) with a corresponding bias term \(b\) results in a \((n_l-k+1)\times(n_l-k+1)\) matrix of neurons in layer \(l+1\). Therefore, if we desire \(m_{k+1}\) channels in layer \(l+1\), then we need \(m_{l+1}\) different \(k\times k\times m_l\) filters \(\W_q\) with a corresponding bias term \(b_q\), to obtain the \((n_l-k+1)\times(n_l-k+1)\times m_{l+1}\) tensor of neuron values at layer \(l+1\), given as
which can be written more compactly as
where the activation function \(f\) distributes over all of its arguments.
In summary, a convolution layer takes as input the \(n_l\times n_l\times m_l\) tensor \(\Z^l\) of neurons from layer \(l\), and then computes the \(n_{l+1}\times n_{l+1}\times m_{l+1}\) tensor \(\Z^{l+1}\) of neurons for the next layer \(l+1\) via the convolution of \(\Z^l\) with a set of \(m_{l+1}\) different 3D filters of size \(k\times k\times m_l\), followed by adding the bias and applying some non-linear activation function \(f\). Note that each 3D filter applied to \(\Z^l\) results in a new channel in layer \(l+1\). Therefore, \(m_{l+1}\) filters are used to yield \(m_{l+1}\) channels at layer \(l+1\).
26.3.3 Padding and Striding
One of the issues with the convolution operation is that the size of the tensors will necessarily decrease in each successive CNN layer. If layer \(l\) has size \(n_l\times n_l\times m_l\), and we use filters of size \(k\times k\times m_l\), then each channel in layer \(l+1\) will have size \((n_l-k+1)\times(n_l-k+1)\). That is the number of rows and columns for each successive tensor will shrink by \(k-1\) and that will limit the number of layers the CNN can have.
Padding
To get around this limitation, a simple solution is to pad each tensor along both the rows and columns in each channel by some default value, typically zero. Assume that we add \(p\) rows both on top and bottom, and \(p\) columns both on the left and right. With padding \(p\), the implicit size of layer \(l\) tensor is then \((n_l+2p)\times(n_l+2p)\times m_l\). Assume that each filter is of size \(k\times k\times m_l\), and assume there are \(m_{l+1}\) filters, then the size of the layer \(l+1\) tensor will be \((n_l+2p-k+1)\times(n_l+2p-k+1)\times m_{l+1}\). Since we want to preserve the size of the resulting tensor, we need to have
With padding, we can have arbitrarily deep convolutional layers in a CNN.
Striding
Striding is often used to sparsify the number of sliding windows used in the convolutions. That is, instead of considering all possible windows we increment the index along both rows and columns by an integer value \(s\geq 1\) called the stride. A 3D convolution of \(\Z_l\) of size \(n_l\times n_l\times m_l\) with a filter \(\W\) of size \(k\times k\times m_l\), using stride \(s\), is given as:
where \(t=\lfloor\frac{n_l-k}{s}\rfloor\). We can observe that using stride \(s\), the convolution of \(\Z_l\in\R^{n_l\times n_l\times m_l}\) with \(\W\in\R^{k\times k\times m_l}\) results in a \((t+1)\times(t+1)\) matrix.
26.3.4 Generalized Aggregation Functions: Pooling
Let \(\Z^l\) be a \(n_l\times n_l\times m_l\) tensor at layer \(l\).
Avg-Pooling
If we replace the summation with the average value over the element-wise product of \(\Z_k^l(i,j,q)\) and \(\W\), we get
Max-Pooling
If we replace the summation with the maximum value over the element-wise product of \(\Z_k^l(i,j,q)\) and \(\W\), we get
Note
\(\max(\Z_k^l(i,j,q)\od\W)=\underset{a=1,2,\cds,k;b=1,2,\cds,k;c=1,2,\cds,r}{\max}\) \(\{z_{i+a-1,j+b-1,q+c-1}^l\cd w_{a,b,c}\}\)
The 3D convolution of \(\Z^l\in\R^{n_l\times n_l\times m_l}\) with filter \(\W\in\R^{k\times k\times r}\) using max-pooling, denoted \(\Z^l*_\max\W\), results in a \((n_l-k+1)\times(n_l-k+1)\times(m_l-r+1)\), given as:
Max-pooling in CNNs
Typically, max-pooling is used more often than avg-pooling. Also, for pooling it is very common to set the stride equal to the filter size \((s=k)\), so that the aggregation function is applied over disjoint \(k\times k\) windows in each channel in \(\Z^l\). More importantly, in pooling, the filter \(\W\) is by default taken to be a \(k\times k\times 1\) tensor all of whose weights are fixed as 1, so that \(\W=\1_{k\times k\times 1}\). In other words, the filter weights are fixed at 1 and are not updated during backpropagation. Further, the filter uses a fixed zero bias (that is, \(b=0\)). Finally, note that pooling implicitly uses an identity activation function. As such, the convolution of \(\Z^lom\R^{n_l\times n_l\times m_l}\) with \(\W\in\R^{k\times k\times 1}\), using stride \(s=k\), results in a tensor \(\Z^{l+1}\) of size \(\lfloor\frac{n_l}{s}\rfloor\times\lfloor\frac{n_l}{s}\rfloor\times m_l\).
26.3.5 Deep CNNs
Starting from the input layer, a deep CNN is comprised of multiple, typically alternating, convolution and pooling layers, followed by one or more fully connected layers, and then the final output layer. For each convolution and pooling layer we need to choose the window size \(k\) as well as the stride value \(s\), and whether to use padding \(p\) or not. We also have to choose the non-linear activation functions for the convolution layers, and also the number of layers to consider.
26.3.6 Training CNNs
Consider a network with a single convolution layer and a max-pooling layer, followed by a fully connected layer. For simplicity, we assume that there is only one channel for the input \(\X\), and further, we use only one filter.
Feed-forward Phase
Let \(\D=\{\X_i,\y_i\}_{i=1}^n\) denote the training data, comprising \(n\) tensors \(\X_i\in\R^{n_0\times n_0\times m_0}\) (\(m_0=1\)) and the corresponding response vector \(\y_i\in\R^p\). Given a training pair \((\X,\y)\in\D\), in the feed-forward phase, the predicted output \(\o\) is given via the following equations:
where \(*_{s_2,\max}\) denotes max-pooling with stride \(s_2\).
backpropagation Phase
Given the true response \(\y\) and predicted output \(\o\), we can use any loss function \(\cE_\X\) to evaluate the discrepancy between them. Let \(\bs\delta^1, \bs\delta^2, \bs\delta^3\) denote the net gradient vectors at layers \(l=1,2,3\), respectively, and let \(\bs\delta^o\) denote the net gradient vector at the output layer. The output net gradient vector is obtained in the regular manner by computing the partial derivatives of the loss function (\(\pd\bs\cE_\X\)) and the activation function (\(\pd\f^o\)):
assuming that the output neurons are independent.
Since layer \(l=3\) is fully connected to the output layer, and likewise the max-pooling layer \(l=2\) is fully connected to \(\Z^3\), the net gradients at these layers are computed as in a regular MLP
The last step follows from the fact that \(\pd\f^2=\1\), since max-pooling implicitly uses an identity activation function. Note that we also implicitly reshape the net gradient vector \(\bs\delta^2\), so that its size is \(((n_2)^2\times n_3)\times(n_3\times 1)=(n_2)^2\times 1=n_2\times n_2\), as desired.
Consider the net gradient \(\delta_{ij}^1\) at neuron \(z_{ij}^1\) in layer \(l=1\) where \(i,j=1,2,\cds,n_1\). Since we assume that the stride \(s_2\) equals the filter size \(k_2\) for the max-pooling layer, each sliding window in the convolution layer contributes only to one neuron at the max-pooling layer. Given stride \(s_2=k_2\), the \(k_2\times k_2\) sliding window that contains \(z_{ij}^1\) is given as \(\Z_{k_2}^1(a,b)\), where
Due to the max aggregation function, the maximum valued element in \(\Z_{k_2}^1(a,b)\) specifies the value of neuron \(z_{ab}^2\) in the max-pooling layer \(l=2\).
where \(i^*, j^*\) is the index of the maximum valued neuron in the window \(\Z_{k_2}^1(a,b)\).
The net gradient \(\delta_{ij}^1\) at neuron \(z_{ij}^1\) is therefore given as
where \(net_{ij}^l\) denotes the net input at neuron \(z_{ij}^l\) in layer \(l\). However, since \(net_{ab}^2=z_{i^*,j^*}^1\), the partial derivative \(\frac{\pd net_{ab}^2}{\pd z_{ij}^1}\) is either 1 or 0, depending on whether \(z_{ij}^1\) is the maximum element in the window \(\Z_{k_2}^1(a,b)\) or not.
From the net gradients, we can compute the gradeitns of the weight matrices and bias parameters. For the fully connected layers, that is, between \(l=2\) and \(l=3\), and \(l=3\) and \(l=4\), we have
where we treat \(\Z^2\) as a \((n_2)^2\times 1\) vector.
Note that the weight matrix \(\W_1\) is fixed at \(\1_{k_2\times k_2}\) and the bias term \(b_1\) is also fixed at \(0\), so there are no parameters to learn between the convolution and max-pooling layers. Finally, we compute the weight and bias gradients between the input and convolution layer as follows:
where we used the fact that the stride is \(s_1=1\), and that \(\W_0\) is a shared filter for all \(k_1\times k_1\) windows of \(\X\), with the shared bias value \(b_0\) for all windows. There are \(n_1\times n_1\) such windows, where \(n_1=n_0-k_1+1\), therefore, to compute the weight and bias gradients, we sum over all the windows. Note that if there were multiple filters (this is, if \(m_1>1\)), then the bias and weight gradients for the \(j\)th filter would be learned from the corresponding channel \(j\) in layer \(l=1\).
26.4 Regularization
Consider the squared error loss function, given as
where \(\y\) is the true response and \(\hat\y=\o\) the predicted response on a given input \(\x\). The goal of learning is the minimize the expected loss \(E[L(\y,\hat\y)]=E[(\y-\hat\y)^2]\).
The expected loss can be decomposed into three terms: noise, bias, and variance, given as
In general, there is always a trade-off between reducing bias and reducing variance.
Regularization is an approach whereby we constrain the model parameters to reduce overfitting, by reducing the variance at the csot of increasing the bias slightly.
In general, for any learning model \(M\), if \(L(\y,\hat\y)\) is some loss function for a given input \(\x\), and \(\bs{\rm\Theta}\) denotes all the model parameters, where \(\hat\y=M(\x|\bs{\rm\Theta})\). The learning objective is to find the parameters that minimize the loss over all instances:
With regularization, we add a penalty on the parameters \(\bs{\rm\Theta}\), to obtain the regularized objective:
Note
\(\dp\min_{\bs{\rm\Theta}}J(\bs{\rm\Theta})=\sum_{i=1}^nL(\y_i,\hat{\y_i})+\alpha R(\bs{\rm\Theta})\)
where \(\alpha\geq 0\) is the regularization constant.
Let \(\th\in\bs{\rm\Theta}\) be a parameter of the regression model. Typical regularization functions include the \(L_2\) norm, the \(L_1\) norm, or even a combination of these, called the elastic-net:
with \(\ld\in[0,1]\).
26.4.1 \(L_2\) Regularization for Deep Learning
MLP with One Hidden Layer
Consider regularization in the context of a feed-forward MLP with a single hidden layer. Let the input \(\x\in\R^d\), the hidden layer \(\z\in\R^m\) and let \(\hat\y=\o\in\R^p\). The set of all the parameters of the model are
Whereas it makes sense to penalize large weights, we usually do not penalize the bias terms since they are just thresholds that shift the activation function and there is no need to force them to be small values. The \(L_2\) regularized objective is therefore given as
Here we added the factor \(1/2\) to the regularization term for convenience. For the \(L_2\) norm of the weight matrices, we use the Frobenius norm, which has the usual sense of \(L_2\)-norm, since for \(n\times m\) matrix \(\A\), it is defined as
The regularized objective tries to minimize the individual weights for pairs of neurons between the input and hidden, and hidden and output layers. This has the effect of adding some bias to the model, but possibly reducing variance, since small weights are more robust to changes in the input data in terms of the predicted output values.
The regularized objective has two separate terms, one for the loss and the other for the \(L_2\) norm of the weight matrices. Recall that we have to compute the weight gradients \(\nabla_{w_{ij}}\) and the bias gradients \(\nabla_{b_j}\) by computing
where \(\frac{\pd\cE_\x}{\pd w_{ij}}=\delta_j\cd z_i\) and \(\frac{\pd\cE_\x}{\pd b_j}=\delta_j\), and where \(\delta_j=\frac{\pd\cE_\x}{\pd net_j}\) is the net gradient. Further, since the squared \(L_2\) norm of a weight matrix is simply the sum of the squared weights, only the term \(w_{ij}^2\) matters, and all other elements are just constant with respect to the weight \(w_{ij}\) between neurons \(i\) and \(j\) (in \(\W_h\) or \(\W_o\)). Across all the neuron pairs between the hidden and output layer, we can write the update rule compactly as follows:
where \(\bs\delta_o\) is the net gradient vector for the output neurons, and \(\z\) is the vector of hidden layer neuron values. The gradient update rule using the regularized weight gradient matrix is given as
\(L_2\) regularization is also called weight decay, since the updated weight matrix uses decayed weights from teh previous step, using the decay factor \(1-\eta\cd\alpha\).
In a similar manner we get the weight and bias gradients between the input and hidden layers:
The update rule for weight matrix between the input and hidden layers is therefore given as
Deep MLPs
We denote the input neurons as layer \(l=0\), the first hidden layer as \(l=1\), the last hidden layer as \(l=h\), and the final output layer as \(l=h+1\). The vector of neuron values for layer \(l\) (for \(l=0,\cds,h+1\)) is denoted as
where \(n_l\) is the number of neurons in layer \(l\). Thus \(\x=\z^0\) and \(\o=\z^{h+1}\). The weight matrix between neurons in lyaer \(l\) and layer \(l+1\) is denoted \(\W_l\in\R^{n_l\times n_{l+1}}\), and the vector of bias terms from the bias neuron \(z_0^l\) to neurons in layer \(l+1\) is denoted \(\b_l\in\R^{n_{l+1}}\), for \(l=1,\cds,h+1\).
Given the error function \(\cE_\x\), the \(L_2\) regularized objective function is
where the set of all the parameters of the model is \(\bs{\rm\Theta}=\{\W_0,\b_0,\W_1,\b_1,\cds,\W_h,\b_h\}\). Based on the derivation for the one hidden layer MLP from above, teh regularized gradient is given as:
Note
\(\nabla_{\w_l}=\z^l\cd(\bs\delta^{l+1})^T+\alpha\cd\W_l\)
and the update rule for weight matrices is
Note
\(\W_l=\W_l-\eta\cd\nabla_{\w_l}=(1-\eta\cd\alpha)\cd\W_l-\eta\cd(\z^l\cd(\bs\delta^{l+1})^T)\)
for \(l=0,2,\cds,h\), where \(\bs\delta^l\) is the net gradient vector for the hidden neurons in layer \(l\). We can thus observe that incorporating \(L_2\) regularization within deep MLPs is relatively straightforward. Likewise, it is easy to incorporate \(L_2\) regularization in other models like RNNs, CNNs, and so on. For \(L_1\) regularization, we can apply the subgradeint approach outlined for \(L_1\) regression or Lasso.
26.4.2 Dropout Regularization
The idea behind dropout regularization is to randomly set a certain fraction of the neuron values in a layer to zero during training time. The aim is to make the network more robust and to avoid overfitting at the same time. By dropping random neurons for each training point, the network is forced to not rely on any specific set of edges. From the perspective of a given neuron, since it cannot rely on all its incoming edges to be present, it has the effect of not concentrating the weight on specific input edges, but rather the weight is spread out among the incoming edges. However, note that while \(L_2\) regularization directly changes the objective function, dropout regularization is a form of structural regularization that does not change the objective function, but instead changes the network topology in terms of which connections are currently active or inactive.
MLP with One Hidden Layer
Let the input \(\x\in\R^d\), the hidden layer \(\z\in\R^m\) and let \(\hat\y=\o\in\R^p\). During the training phase, for each input \(\x\), we create a random mask vector to drop a fraction of the hidden neurons. Formally, let \(r\in[0,1]\) be the probability of keeping a neuron, so that the dropout probability is \(1-r\). We create a \(m\)-dimensional multivariate Bernoulli vector \(\u\in\{0,1\}^m\), called the masking vector, each of whose entries is 0 with dropout probability \(1-r\), and 1 with probability \(r\). Let \(\u=(u_1,u_2,\cds,u_m)^T\), where
The feed-forward step is then given as
The net effect is that the masking vector zeros out the \(i\)th hidden nueron in \(\td\z\) if \(u_i=0\). Zeroing out also has the effect that during the backpropagation phase the error gradients do not flow back from the zeroed out neurons in the hidden layer. The effect is that any weights on edges adjacent to zeroed out hidden neurons are not updated.
Inverted Dropout
With \(r\) as the probability of retaining a hidden neuron, its expected output value is
On the other hand, since there is no dropout at test time, the outputs of the hidden neurons will be higher at testing time. So one idea is to scale the hidden neuron values by \(r\) at testing time. On the other hand, there is a simpler approach called inverted dropout that does not need a change at testing time. The idea is to rescale the hidden neurons after the dropout step during the training phase, as follows:
with the scaling factor \(1/r\), the expected value of each neuron remains the same as without dropout, since
Dropout in Deeop MLPs
Let \(r_l\in[0,1]\), for \(l=1,2,\cds,h\) denote the probability of retaining a hidden neuron for layer \(l\), so that \(1-r_l\) is the dropout probability. One can also use a single rate \(r\) for all the layers by setting \(r_l=r\). Define the masking vector for hidden layer \(l\), \(\u^l\in\{0,1\}^{n_l}\), as follows:
The feed-forward step between layer \(l\) and \(l+1\) is then given as
Note
\(\z^l=f(\b_l+\W_l^T\td\z^{l-1})\)
\(\dp\td\z^l=\frac{1}{r_l}\cd(\u^l\od\z^l)\)
using inverted dropout. Usually, no masking is done for the input and output layers, so we can set \(r^0=1\) and \(r^{h+1}=1\). Also note that there is no dropout at testing time. The dropout rates are hyperparameters of the model that have to be tuned ona separate validation dataset.